
Spring Semester Begins
The next ECE Colloquium is Wednesday, November 15th from 10:20 - 11:40 in COR - 101 and Dr. Scott Acton from the University of Virginia will be presenting. He will be presenting a talk titled, Visual Revolution: The Power of Images, Video, and Machine Learning. More information can be found in the flyer below.

Dean of Engineering Alberto Cuitino announced that ECE Professor Anand Sarwate will receive the Outstanding Engineering Faculty Award. The award is bestowed in recoginition of Prof. Sarwate's exceptional performance in teaching and outstanding research. The award recognizes the strong commitment and dedication of exceptional faculty. The award will be presented at 4 PM on Monday November 20th at the SOE Faculty Awards ceremony.
Congratulations on this excellent achievement!


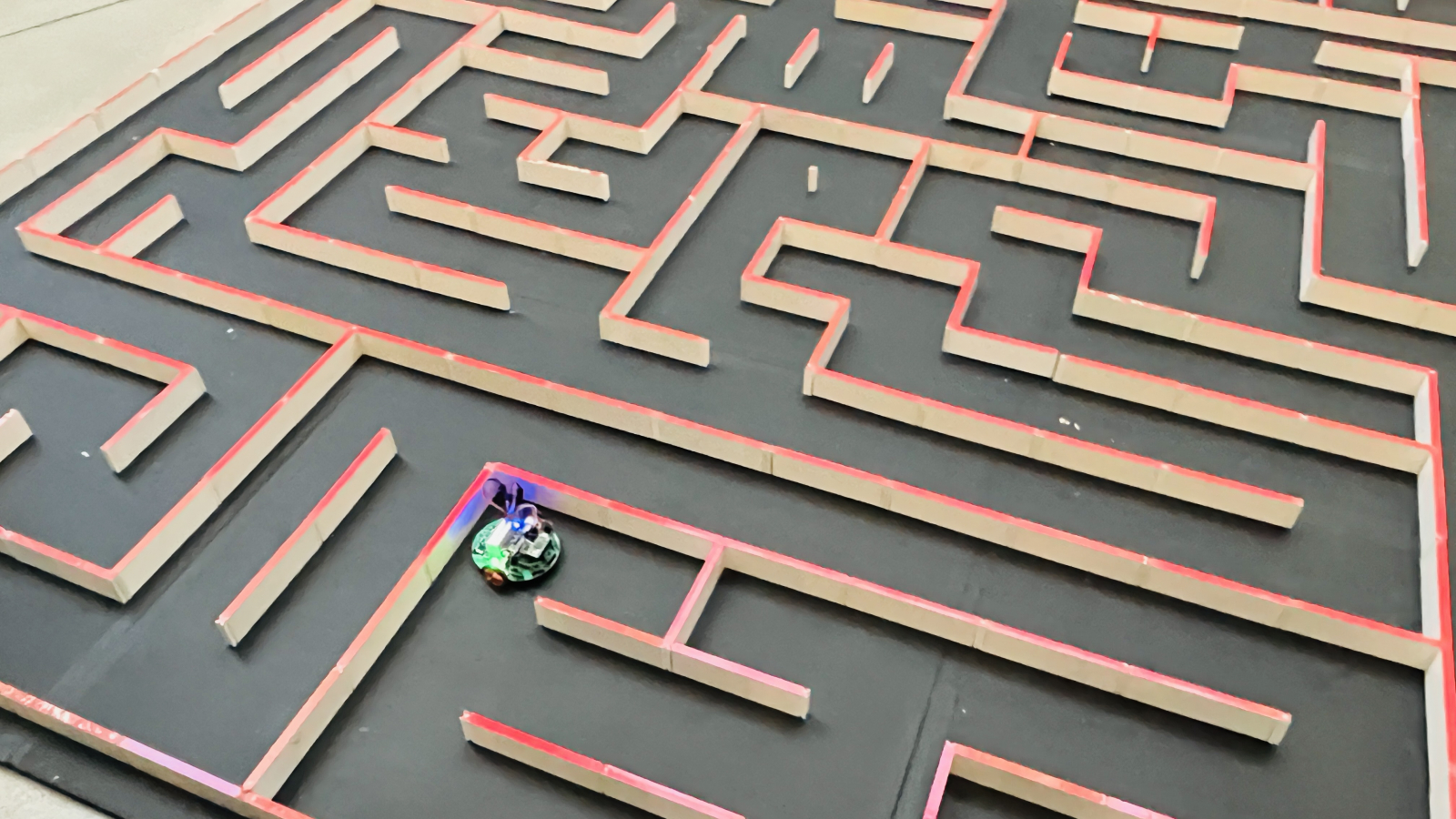
On October 7th, 2023, two teams, "RATZ" and "RemIEEE," representing the Rutgers IEEE Micromouse division, participated in a Micromouse Competition held at the Massachusetts Institute of Technology (MIT). The primary objective of this competition was to construct a robotic "mouse" capable of autonomously navigating to the central 2x2 portion of a 16x16 maze in the shortest time possible. The event was organized by IEEE Region 1 and was hosted as a part of the IEEE MIT Undergraduate Research Technology Conference.
Before the official competition commenced, teams were granted the opportunity to conduct test runs with their robot mice and make any necessary adjustments. Subsequently, all participating teams gathered in a lecture hall to provide brief presentations about the design and functionality of their robotic creations.
During the official competition, each team was allotted 10 minutes to make attempts with their robot mice. The starting point for each mouse was the bottom-left corner of the maze, and if teams needed to reset their runs, they were required to place their mice back in this initial position. Judges were responsible for monitoring the remaining time for each team and assessing how close each team's mouse came to reaching the center of the maze. As none of the mouse robots successfully reached the maze's center, the rankings were determined by the proximity of each mouse to the center rather than the time taken. Team RATZ secured first place by coming closest to the center of the maze, while team RemIEEE claimed third place for having the third closest distance to the center.


ECE Students,
Learn how ECE Undergraduate Students can accelerate their careers by completing a Master’s degree in as little as one year!

You're invited to this Rutgers Efficient AI (REFAI) Seminar